手術支援ロボット

外科の手術といえば、執刀医がおなかにメスを入れ、内臓などの患部を処置していく─。
そんなイメージを持つ人が多いでしょう。しかし今、開腹、開胸による外科手術の割合は確実に減少傾向。
一方で増加しているのが、内視鏡を使った手術です。
「おなかに5mmから数cmの穴を開け、そこから内視鏡や手術器具を挿入して行う内視鏡手術のメリットは、何より患者の負担が軽減されること。当然ながら傷の跡は小さく、治りも早い。手術の種類によっては翌日に退院できるケースもあります」
そう解説してくれたのは、精密工学研究所の只野耕太郎准教授。内視鏡手術用ロボットを開発・製造するベンチャー企業を今年6月に設立したメンバーのひとりです。先端の工学技術を医療に生かす「医工連携」は、東工大が力を注いでいるテーマのひとつ。2010年には、医療・健康・安全分野でのイノベーションを目指す「ライフ・エンジニアリング機構」を立ち上げ、疾病の治療、診断、予防にかかわる多彩な研究も推進しています。
頭の動きで内視鏡を自在に操作
現在、只野准教授が開発を進めるロボットは大きく2つ。それぞれ、内視鏡、手術器具を遠隔操作するロボットです。内視鏡手術では、当然、直接患部を見ることができず、また体の中に手を入れられないため、機器を遠隔操作する技術が重要になるのです。
ひとつ目は、その名のとおり「内視鏡操作システム」。実は内視鏡手術では、手術を行う医師(術者)のほかに、内視鏡を操作する助手がいるのが一般的。術者は両手で手術器具を扱うため、助手が術者から口頭で指示を受け、内視鏡の位置や向きを調整します。
「しかし長時間の手術になると、疲労などでモニターの映像が乱れてしまう。そもそも術者のイメージ通りに内視鏡を操作するには熟練が必要で、人材確保も内視鏡手術の課題となっているんです」。
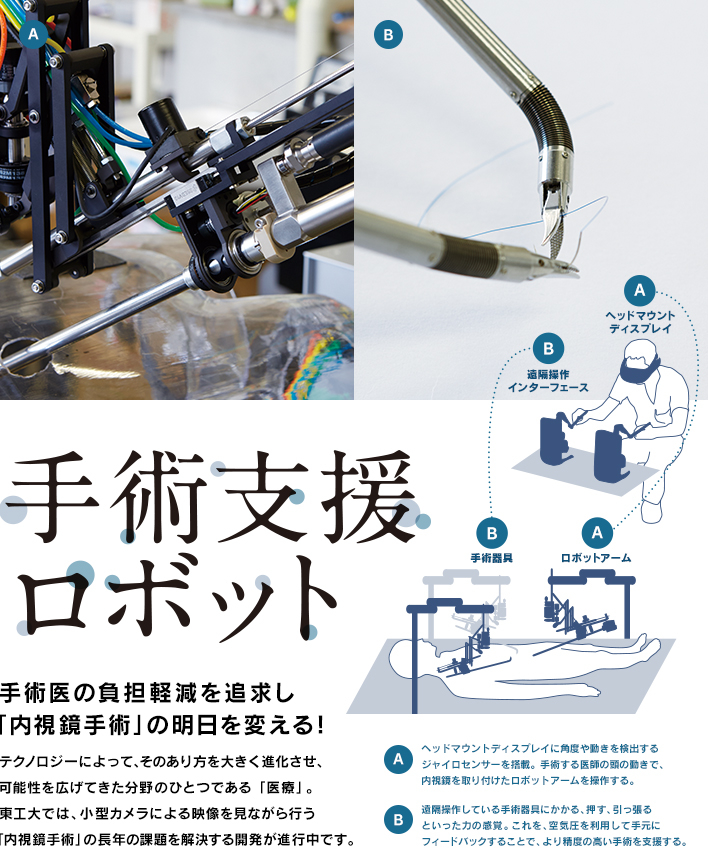
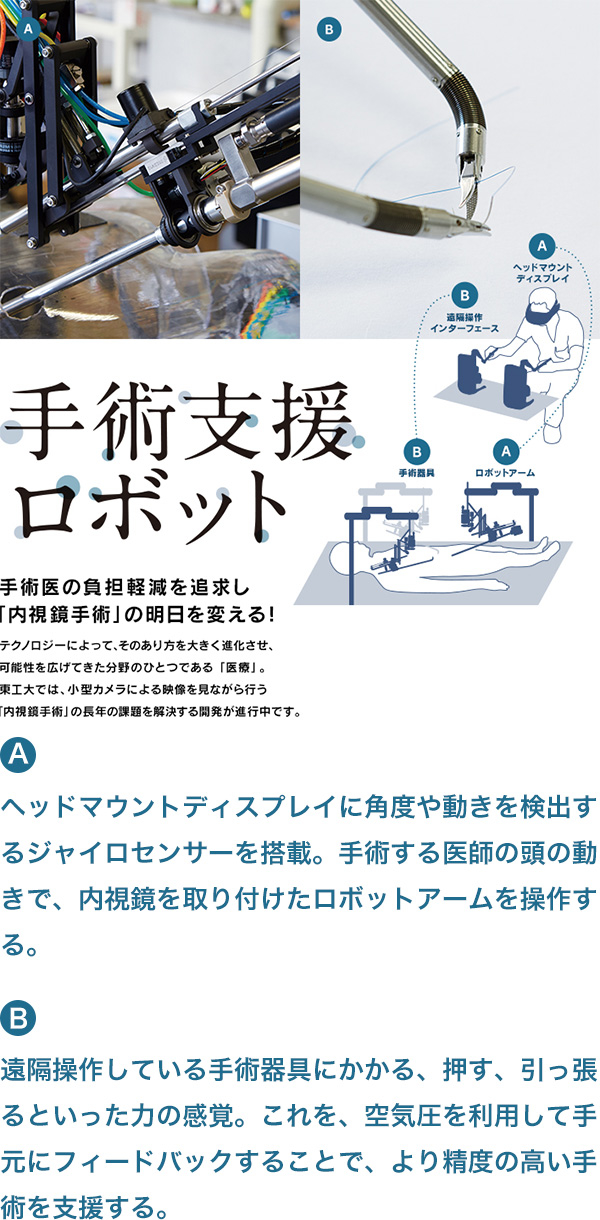
そこで只野准教授が開発しているのが、ロボットアームに内視鏡をセットし、術者自身に取り付けたヘッドマウントディスプレイでそれを操作するシステムです。「ヘッドマウントディスプレイに傾きや動きを検出するジャイロセンサーを搭載し、術者の頭の動きに追従してロボットアームが動く仕組みになっています。特長は、術者が見たい方向に顔を向けると、それに応じて内視鏡も動くところ。見たい方を向くという当たり前の動きで操作できるため、特別な訓練を必要としません。高い緊張を強いられる手術の最中、機器の操作に頭を切り換えるのは大きなストレスですから、"直感的な操作"を重視して開発を行いました」
只野准教授の言う通り、このロボットの魅力は何より自然で違和感のない操作性。これまでも音声やボタンで内視鏡をコントロールする装置はありましたが、多くは「右・左・上・下」と直線的な動きしかできませんでした。つまり右斜め上を見たければ、まず右に動かし、そして上に動かす必要があったのです。しかし今回のシステムなら、術者はそのまま右斜め上を向けばいい。これは微妙な動きを頻繁に求められる実際の手術で大きな強みとなります。
手術器具が感じた"手応え"を手元で再現
そしてもうひとつ、内視鏡手術の質を大きく向上すると期待されているのが「力覚を有する手術支援ロボットシステム」の開発です。力覚とは、いわばモノに触れたときに感じる"手応え"のこと。なぜこの感覚が内視鏡手術で重要なのでしょうか。
「例えば、鉗子という手術器具で内臓を押さえたり、切開した部分を糸で縫ったりする際、開腹手術であれば手応えがあるので、微妙な力加減が可能です。しかし内視鏡手術では、鉗子を機械的に動かしているので、手元では圧力や張力を感じられない。そのため、映像で臓器の変形の様子や糸の張り具合を見て、器具の動きを調整しなければならないのです」と只野准教授は説明します。
確かに、何の手応えもない状態で、モノを適切な力で掴んだり、糸で縫ったりすることを想像してみれば、それがいかに難しいかはよくわかります。だから、いわゆる遠隔操作システムでは、多くの場合、この力覚の手元へのフィードバックが重要なテーマとなるのです。
「器具の先端に力覚センサーを取り付ける方法もありますが、体内に入ることを前提に洗浄や滅菌、小型化などの問題を考えると簡単ではありません。そこで私たちが取り組んでいるのが、空気圧を器具の駆動や力覚の伝達に利用するシステムの開発です」
モーターを用いた従来の遠隔操作システムにおいて力覚のフィードバックが難しい原因のひとつが減速機(歯車)の存在。ごく単純化して説明すると、器具の先端にかかった力を逆に手元に戻そうとしても、間にある減速機の摩擦などが邪魔してそれが妨げられてしまうのです。ところが空気圧駆動のシステムでは減速機が不要であるため、器具にかかった力をフィードバックしやすくなります。具体的には、器具側で感じた力を空気圧の形でとらえ、それを再び力に変換するとどの程度の強さになるかをコンピュータで計算。相応する強さの力を電気的に発生させ、手元で感じさせる仕組みを採用しています。
「一方、手術器具には繊細で滑らかな動きが要求されますが、その点でも空気圧は優秀で、非常にソフトな駆動を実現します。さらに0.1mmの精度で器具の位置を調整することも可能なため、新たな駆動源として空気圧は非常に有望。このシステムについては4、5年先の実用化を見据えています」と只野准教授は言います。

東工大理学部を卒業し、同大学院へ進学する時点でメカノマイクロ工学を専攻した只野准教授。ロボット開発の魅力について、「頭の中でイメージしたものを実際につくり上げ、それを目の前で動かせること」と語ります。「特に今の研究では、自分たちで設計図を描き、部品を調達し、それを組み立てる。さらに動かすためのプログラムも作成します。ゼロからオリジナルのロボットを生み出すので、それが思い通りに機能したときは、やはり単純に嬉しいですね」
ただそれも、実際に医療の現場で使えるものでなければ価値がない、と付け加えます。ロボットというと日本のお家芸のようなイメージですが、それは主に工場等で使う産業用ロボットの話。手術に直接かかわる機器やロボットとなるとほぼ欧米からの輸入に頼っているのが実状です。
「多種多様な研究開発を行う東工大ですが、その中には実際の社会で役に立つ"実学"志向なものも少なくありません。高齢化や医療の問題はこれからの日本が避けては通れないものですから、日本のメーカーが力を発揮できるよう、私たちもできる限り貢献していきたいと思っています。そのためにも、現在開発中のロボットをいち早く実用化することが第一目標。性能や精度をいっそう高めていきたいですね。機械系の開発では、あちらを立てればこちらが立たず、という状況によくぶつかります。もっと可動範囲を広げたいが機構はシンプルにしたい。もっとパワーを出したいが装置は小型化したい......。そうしたトレードオフの関係にある課題をパズルのように解いていき、最善の道を探していくのが私たちの仕事。試行錯誤を繰り返す、厳しい作業ではありますが、それこそが開発の醍醐味だと考えて日々頑張っています」
医工連携の分野に携わってからおよそ10年になる只野准教授。将来的には、手術のやり方を根本から変えるようなロボットを製作するのが夢だと語ります。実際、最新医療の分野では、テクノロジーがそのあり方を大きく変革してきました。まずは、ヘッドマウントディスプレイによる内視鏡操作システム、力覚を持つ手術支援ロボット、この2つが内視鏡手術にどんなイノベーションをもたらすか、これからに注目です。
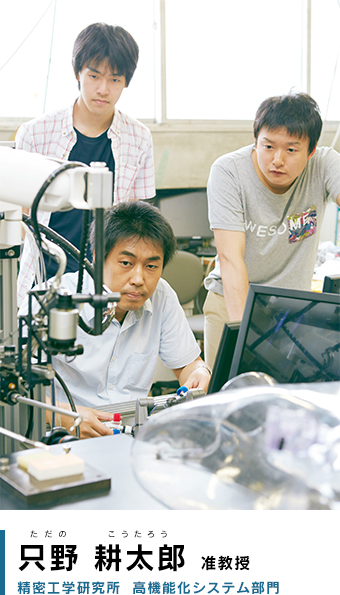
2007年、東京工業大学大学院総合理工学研究科メカノマイクロ工学専攻博士課程修了。同大学精密工学研究所の助教などを経て、2013年6月より現職。研究テーマはマスタ・スレーブシステム、力覚提示、空気圧サーボシステムなど。
体内で手術器具にかかった力を、手元で感じられるようにする仕組みの開発に携わっています。人間ができないことを実現してくれるのがロボットの魅力。自分が思った通りにロボットをコントロールできたときが一番嬉しいですね。
手術支援ロボットは発展途上。私自身、ロボットに搭載して使う新たな手術器具を開発していますが、今後も様々なデバイスが登場するでしょう。医師が人間にしかできない仕事に集中することで、医療の質はまだまだ高まると思います。
(2014年取材)